宇宙での行動に特化した航宙機能内蔵型と、地上での通常生活用である地上型が存在する。
地上型はさらに、全身サイボーグ専用の高出力型、非サイボーグの股関節離断者兼用である低出力型、腕機能併合型(低出力のみ)に分かれる。
また、燃料電池換気プレートを拡大した新型の派生品がある。
足の形式選択は、一応、胴側の仕様と独立に可能である。
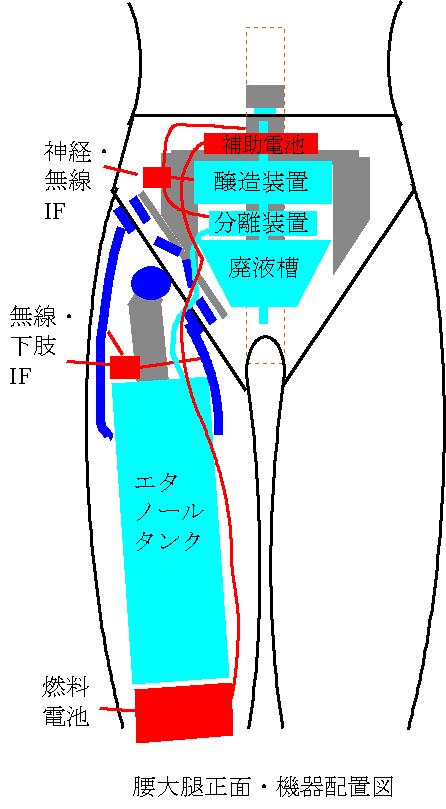
但し、胴側に酸素発生器を搭載すると原料として足から推進剤を吸い上げる必要があるが地上型はエタノールタンクしかない、胴側に消化器残滓からの生成あるいは酒類からの分離によるエタノール供給の機構がないと全身サイボーグでも股関節離断者と同様に頻繁に足を外して補給する必要がある、など不適切な組み合わせによって機能が制限されることがある。
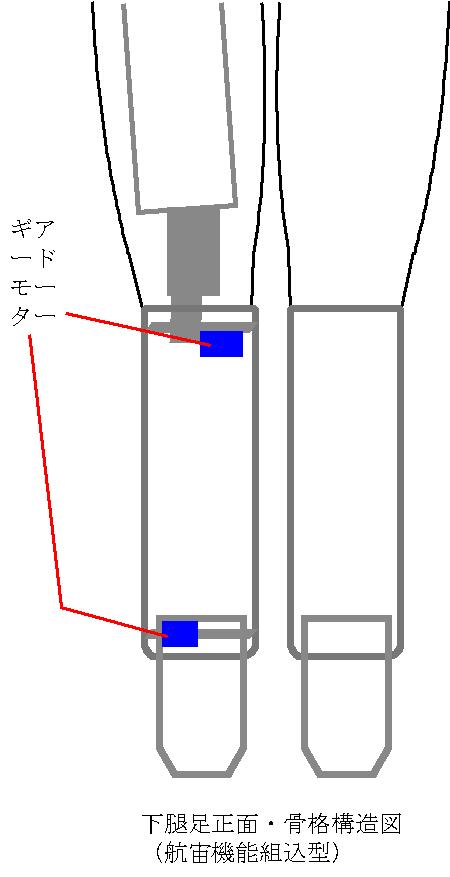
大腿部に推進剤タンク、下腿部にプルトニウム電池とイオン推進器を搭載し、外付け用具無しで宇宙空間における行動を可能とした形式である。
放熱を外皮からの赤外線放射に依存するため、下腿部外皮は軽金属製で、靴、靴下等の着用は不可能である。
膝関節、足関節の駆動を小型ギヤードモーターによるため、脚力は常人の120%程度に過ぎない。
イオンエンジン配管保護のため、足関節の運動は定位置が下腿軸と同軸かつ可動性は前後方向のみ30度に制限される。
足部の形はトゥシューズ状で指はなく、先端にイオンエンジン噴射口が開口する。
足指の末梢神経はイオンエンジン操作系に接続される。
関節機能の制約と特殊な形状のため、歩行は常時バレエのポワント体勢となり、地上重力下ではジャイロスタビライザーを使用しなければ困難である。
放射能汚染防止のため地上では基地外への持ち出しが禁じられ、地上で日常生活に使用される機会はない。
しかし、打ち上げ準備や帰還収容時に地上歩行する必要があること、有事に装着したまま地上作戦を行う可能性およびジャイロスタビライザー不調の可能性を考慮すべきである。
この対策のため、素体養成訓練においてはバレエの上級レッスンが課せられている。
股関節部は配管を除き地上型と共通なため、構造上は離断者への装着が可能であるが、機密保護、真空中に出られないこと、放射線障害の危険性および歩行困難性から禁止されている。
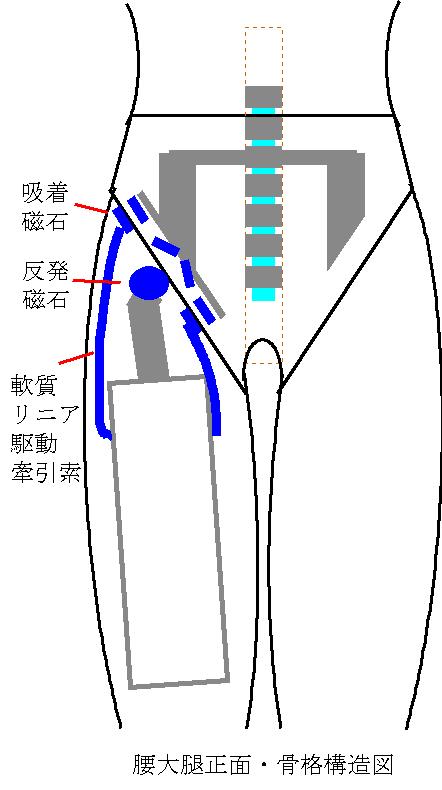
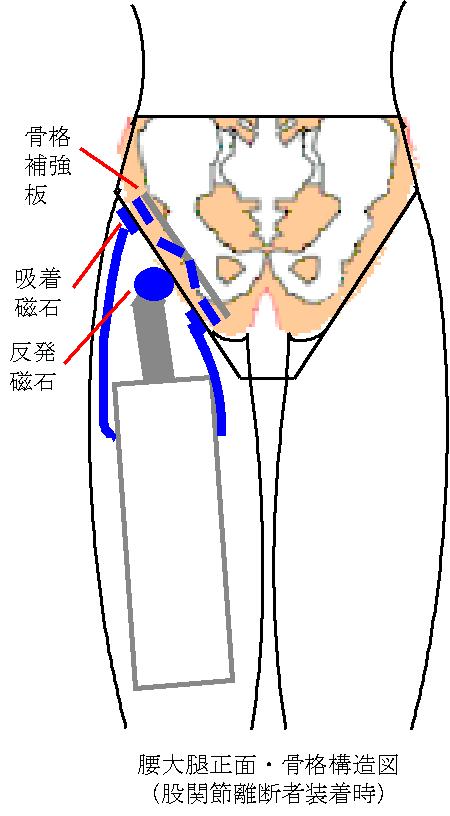
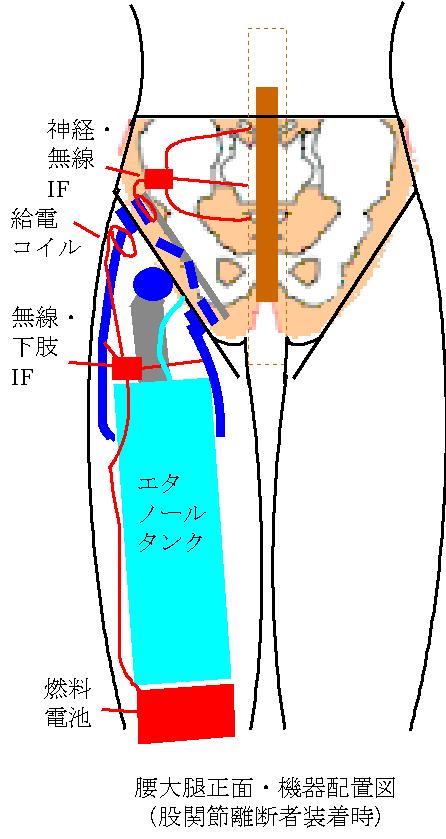
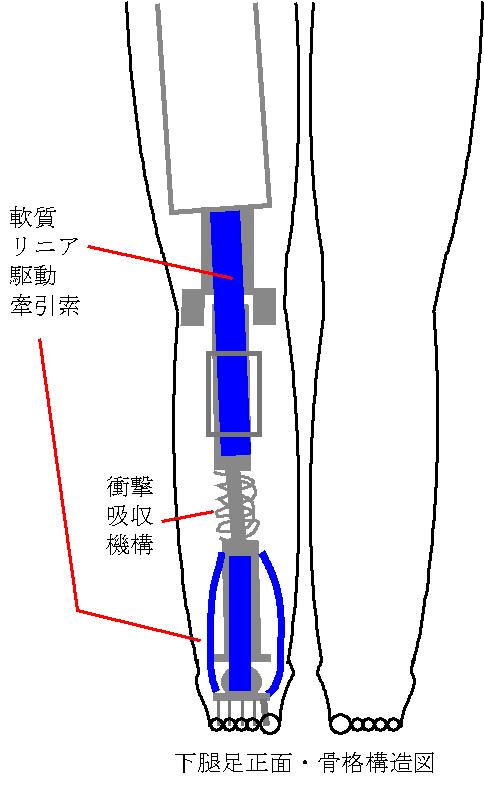
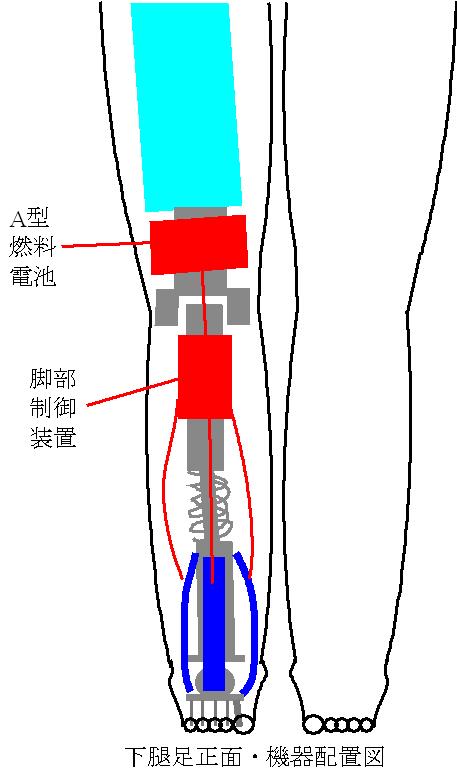
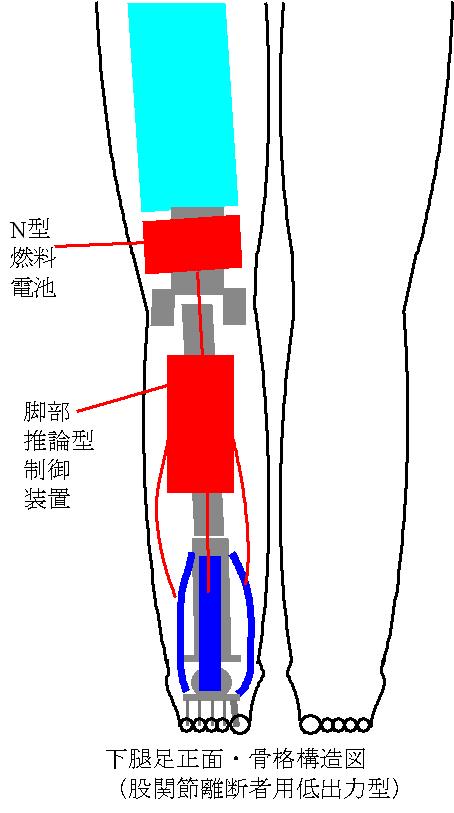
大腿部にエタノールタンク及び燃料電池を搭載し、下腿部をほぼ完全な能動義足とした形式である。
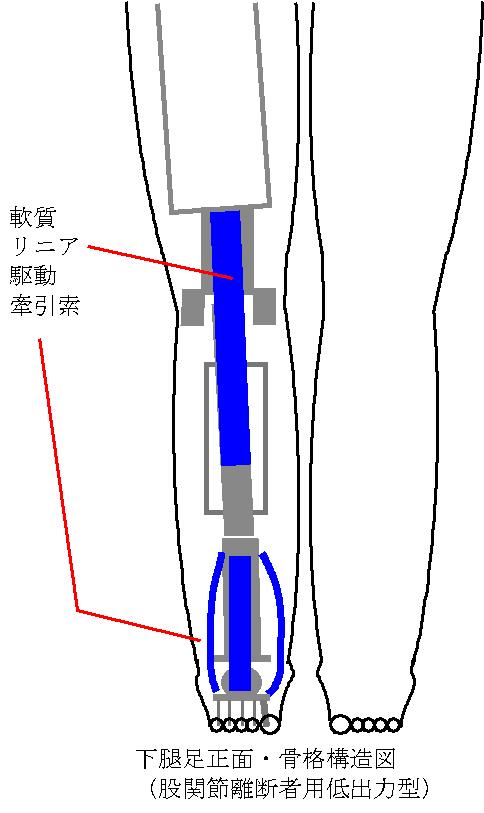
全ての関節駆動に軟質リニアモーター式牽引帯が使用され、関節自由度も常人と同等またはやや多めとなっている。
股関節断端結合部は、牽引帯の支持体となる外周寄り外装を磁気吸着することで胴体に牽引力を伝達する。
体重を受け止める中心骨格は、逆に磁気反発サスとすることで、高荷重時の断端負荷を軽減する。
この機構はサイボーグ用と股関節離断者用が共通化され、コストダウンをはかっている。
股関節離断者が使用する場合は、断端に神経トランスミッタをインプラントし、骨盤に補強板を介して吸着・反発用磁石を固定する。
部品小型化の限界から短い足を製作するのが難しいため、片足離断者は健足の長さが不足すると歩行に障害をきたす。
大抵の場合、健足を除去し両足同型とすることでQOLが向上する。
同じ理由により、膝下等の部分使用、即ち股関節以外の切断者がそのまま使用するのも不可能で、股関節から離断し直すことで適用となる。
サイボーグは、外装の溶着により牽引強度が大きく、荷重による断端劣化限界も高いこと、胴体部への給電が多いことから、通常は燃料電池出力と牽引帯出力を増加した専用の高出力型を装着する。
高出力型では、サイボーグ専用化に伴い制御装置が小型化した空間を利用し、下腿骨格に跳躍・着地能力強化用サスペンションが追加される。
腕機能併合型は、上肢断端の条件が悪く義手装着が困難な離断者の生活改善向けに開発された形式である。
足指とは別に、上肢断端にインプラントされた無線神経トランスミッタから制御される指が甲に生えており、手の代替となる。
制御回路が大型のため低出力型のみ製造されている。
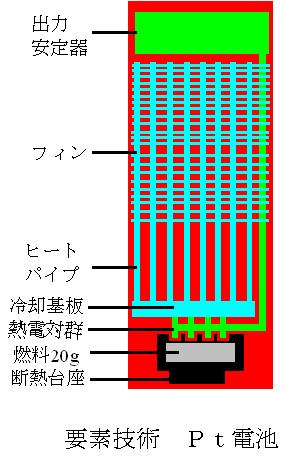
20グラムのプルトニウムを熱源とし熱電対アレイにより真空中で500Wの電力を発生する。
容積の大半は低温側冷却用のヒートパイプおよびフィンである。
熱はフィンが接する外皮に伝導され赤外線として放射される。
帝国環境基本法および特区憲法反核条項に抵触するため、宙軍基地外への持ち出しは厳禁されている。
使用権原が秘密勅令によっており、仮に全身サイボーグ技術が開放されてもなお機密事項である。
(新換気プレート)
外周楕円吸着リング磁石 長径48cm 短径24cm 面積700平方センチメートル、吸着力80Kg
中心反発球形磁石 直径6cm 反発力 20Kg
側方最大折れ角 脊柱を法線とする平面に対し仰角30度
前後方最大折れ角 脊柱を法線とする平面に対し仰角80度
定位置は、大腿軸と同方向。
前方10度、後方170度の可動範囲を有する。
定位置は、下腿を法線とする面に対し足部の俯角20度。
前後左右とも70度の可動範囲を有する。
定位置は足部の面に対し仰角20度。 前後70度、左右30度の可動範囲を有する。
膝、足ともギヤードモーター駆動のため単純なギヤ付き軸構造である。
防水・防塵は不完全なため、月面や水中での行動後はクリーニングを要する。
全機種の股関節と地上型の全関節に使用される。
股関節と膝関節に使用される大型牽引帯は最大張力40Kg、全長可変範囲20cmから40cm
足関節に使用される中型牽引帯は最大張力25Kg、全長可変範囲15cmから30cm
指関節に使用される小型牽引帯は最大張力15Kg、全長可変範囲10cmから20cm
航宙型の膝・足関節に使用される。
最大トルク10Kg・m
マイクロ波で加熱した高温水蒸気を交流放電で電離させ推進剤として使用するイオン推進器。
推力は低いが、推進剤の調達が容易で呼吸用酸素発生にも流用できる利点がある。
艦のメインエンジンや重機と同方式だが加速器長が20cm程しか無く、安全上グリッド電圧も低いため燃費は大幅に劣る。